实现思路:
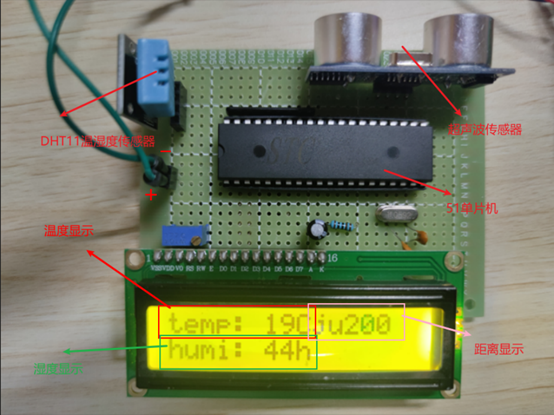
DHT11温湿度传感器和超声波传感器测量数据, 通过at89c51单片机数据处理, 最后将数据显示在液晶显示屏1602上
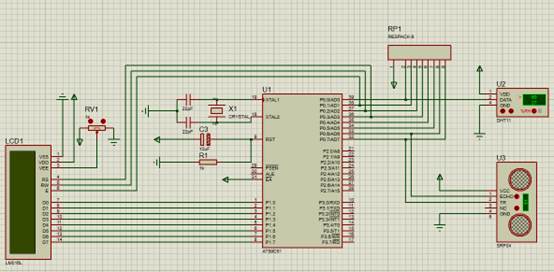
逻辑图

传感器特点
DHT11 温湿度传感器
简介
DHT11是一款有已校准数字信号输出的温湿度传感器。 其精度湿度±5%RH, 温度±2℃,量程湿度595%RH, 温度-20+60℃。 DHT11 数字温湿度传感器 是一款含有已校准数字信号输出的温湿度复合传感器 ,它应用专用的数字模块采集技术和温湿度传感技术,确保产品具有极高的可靠性和卓越的长期稳定性。
Hc_Sr04 超声波传感器
简介
HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器和控制电路。其基本工作原理采用IO口TRIG触发测距,给至少10us的高电平信号;模块自动发送8个40khz的方波,自动检测是否有信号返回;有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
设计原理图
实物展示
程序代码
1. 液晶显示屏1602
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
| #include "reg51.h"
#include "string.h"
#include "stdio.h"
#include "dht11.h"
#include "delayms.h"
#include "CSBofCM.h"
#define uint unsigned int
#define uchar unsigned char
sbit scr_E = P0^1;
sbit scr_RW = P0^2;
sbit src_RS = P0^3;
uchar index;
int pre_temp, temp_suf, pre_humi, humi_suf;
uchar temp[14] = "temp: ";
uchar humi[9] = "humi: ";
void write_address(uchar address)
{
src_RS = 0;
P1 = address;
delayms(5);
scr_E = 1;
delayms(5);
scr_E = 0;
}
void write_data(uchar data_)
{
src_RS = 1;
P1 = data_;
delayms(5);
scr_E = 1;
delayms(5);
scr_E = 0;
}
void lcd_init()
{
scr_E = 0;
scr_RW = 0;
write_address(0x38);
write_address(0x0c);
delayms(50);
write_address(0x06);
delayms(50);
write_address(0x01);
delayms(50);
}
void display()
{
pre_temp = high_temp / 10;
temp_suf = high_temp % 10;
temp[6] = '0' + pre_temp;
temp[7] = '0' + temp_suf;
temp[8] = 'C';
temp[9] = ' ';
temp[9] = 'j';
temp[10] = 'u';
temp[11] = '0' + f1;
temp[12] = '0' + f2;
temp[13] = '0' + f3;
write_address(0x80);
for(index = 0;index < 14;index++)
{
write_data(temp[index]);
delayms(5);
}
pre_humi = high_humi / 10;
humi_suf = high_humi % 10;
humi[6] = '0' + pre_humi;
humi[7] = '0' + humi_suf;
humi[8] = 'h';
write_address(0x80+0x40);
for(index = 0;index < 9;index++)
{
write_data(humi[index]);
delayms(5);
}
}
|
2. 超声波传感器Hc_Sr04
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
| #include<reg51.h>
#include "intrins.h"
typedef unsigned int uint;
typedef unsigned char uchar;
sbit Echo=P0^6;
sbit Trig=P0^7;
uchar flag;
void CSB_Time0() interrupt 1
{
flag=1;
}
void Delay20us()
{
unsigned char i;
_nop_();
i = 7;
while (--i);
}
void CSB_Rstart()
{
Trig = 1;
Delay20us();
Trig = 0;
return;
}
void CSB_Init()
{
TMOD = 0x01;
TH0 = 0;
TL0 = 0;
EA = 1;
ET0 = 1;
}
uchar f1, f2, f3;
uint time;
float distance;
void CSB_GetOnce()
{
CSB_Rstart();
while(!Echo);
TR0 = 1;
while(Echo);
TR0 = 0;
time = TH0*256+TL0;
distance = (float)(time*0.017);
TH0 = 0;
TL0 = 0;
if((distance >=300)||flag==1)
{
flag=0;
f1 = 'X';
f2 = ' ';
f3 = ' ';
}
else
{
f1 = (uint)distance/100;
f2 = (uint)distance/10%10;
f3 = (uint)distance%10;
}
}
|
3. 温度传感器 DHT11
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
| #include "reg51.h"
#include "intrins.h"
typedef unsigned char uchar;
typedef unsigned int uint;
sbit sign = P0^0;
void delay_us(char n)
{
while(--n);
}
void delay_ms(int z)
{
uchar x, y;
while(z>=0)
{
_nop_();
x = 2;
y = 199;
do
{
while (--y);
} while (--x);
z--;
}
}
void start()
{
sign = 1;
delay_us(2);
sign = 0;
delay_ms(20);
sign = 1;
delay_us(30);
}
uchar rec_one_byte()
{
uchar i,dat = 0;
for(i = 0;i < 8;i++)
{
while(!sign);
delay_us(8);
dat <<= 1;
if(sign == 1)
dat += 1;
while(sign);
}
return dat;
}
uchar high_temp, low_temp, high_humi, low_humi, correct;
void receive_all_data()
{
start();
if(sign == 0)
{
while(sign == 0);
delay_us(40);
high_humi = rec_one_byte();
low_humi = rec_one_byte();
high_temp = rec_one_byte();
low_temp = rec_one_byte();
correct = rec_one_byte();
delay_us(25);
}
}
|
4. 主函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| #include "reg51.h"
#include "1602.h"
#include "dht11.h"
#include "CSBofCM.h"
void main()
{
lcd_init();
CSB_Init();
while(1)
{
receive_all_data();
CSB_GetOnce();
display();
}
}
|